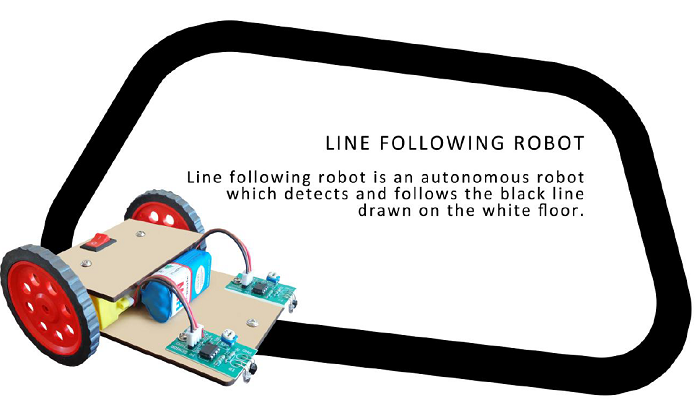
In this project, we will explain how to design and develop a Line Follower Robotic Car. This is an autonomous robotic car which detects and follows a black line drawn on a white floor. It uses two IR sensors to detect the white/black surface, and a transistor-based motor driver is used to send the command to the motors.
- Input units consist of sensors that detect the white path on a black surface or the black path on a white surface.
- QRD1114 IR reflective line/object sensor and CNY70 reflective optical sensor are the most commonly used sensors for line follower robots.
Concepts of IR sensor based Line Follower
The concept of the line follower is related to light reflection behavior. When light falls on a white surface, it is almost fully reflected. In the case of a black surface, the light is completely absorbed.
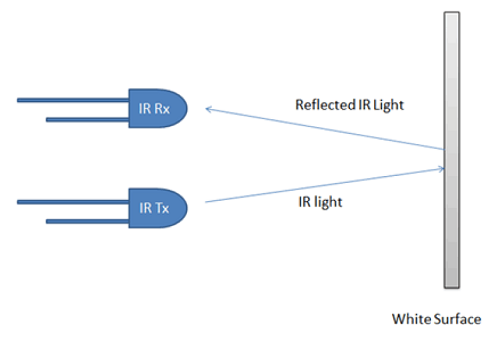
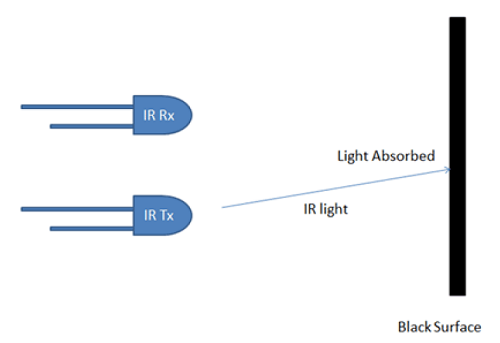
We use IR Transmitters and IR receivers (photo diodes) for sending and receiving light. When infrared rays fall on the white surface, they reflect back and are detected by the photodiodes, generating voltage changes. When IR light falls on the black surface, it is absorbed, and the photo diode receives no light.
Working Principle
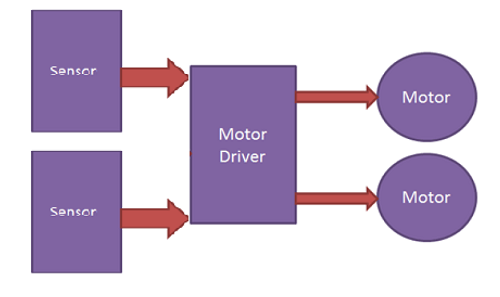
The line follower robot senses the black line using the IR sensors and sends a signal to a transistor-based motor driver. The motor driver then powers the motors according to the sensors' output.
We use two IR sensor modules (left and right) and 2 transistors to power the motors.
- Moving Forward: When both left and right sensors sense white, the robot moves forward.
- Turning Left: If the left sensor detects the black line, the robot turns left.
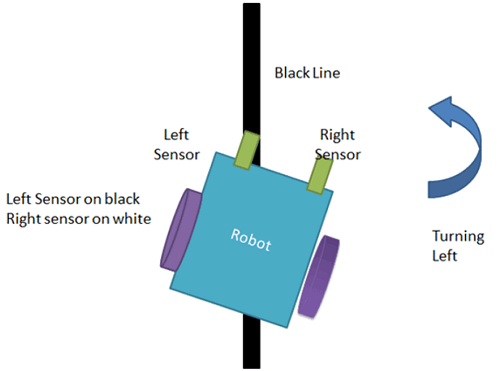
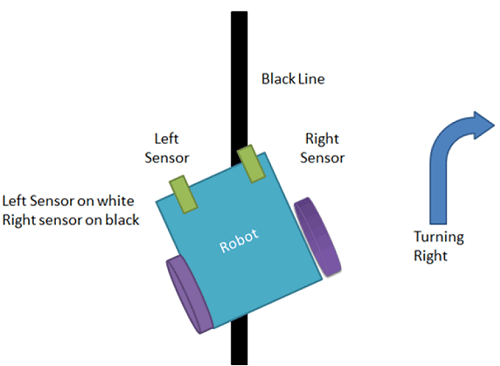
- Turning Right: If the right sensor detects the black line, the robot turns right until both sensors return to the white surface.
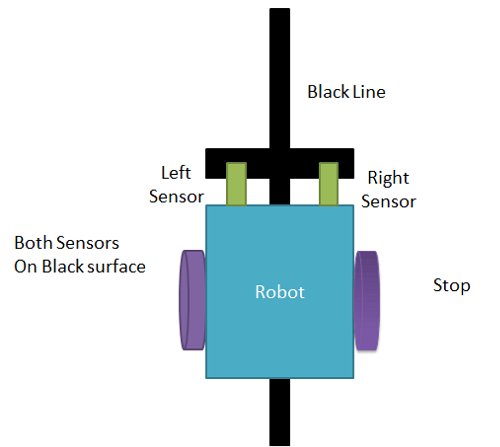
- Stop: If both sensors detect the black line, the robot stops.
Hardware Requirement
- 2 Transistor base motor drivers (BC-547)
- Motor: DC 3-6v BO Gear Motor With Plastic Tire Wheel
- 2 IR Sensors
- External Power: 9V Battery
- Robot chassis
Project Diagram
Benefits & Applications
Advantages
- Robot movement is fully automatic.
- Used for long-distance autonomous applications.
- Fit-and-forget system design.
Limitations
- Always needs a high-contrast path to run on (e.g., black line on white).
- Potential instability on different line thicknesses or sharp, hard angles.
Applications
- Industrial: Automated equipment carriers replacing traditional conveyor belts.
- Automobile: Basis for automatic cars running on roads with embedded magnets/lines.
- Domestic: Floor cleaning and other domestic chores.
- Guidance: Providing path guidance in public places like museums and shopping malls.