Welcome to the premium Self-Driving Robot Project by NextGen Robotics Academy. This state-of-the-art system implements autonomous steering, real-time spatial path planning, and advanced distance evaluations using specialized radar-sweeping servo setups.
Unlike simple bumpers, the Self-Driving Robot proactively scans 180 degrees in front of its trajectory, measures surrounding clearances, and executes sophisticated mathematical steering calculations to navigate narrow corridors and unstructured environments entirely on its own.
- 180° Panoramic Distance Radar Sweep
- Real-time Adaptive Decision Logic
- Multi-cell Lithium Battery Power Train
- Robust 4-Wheel Drive Performance
Project Image Gallery
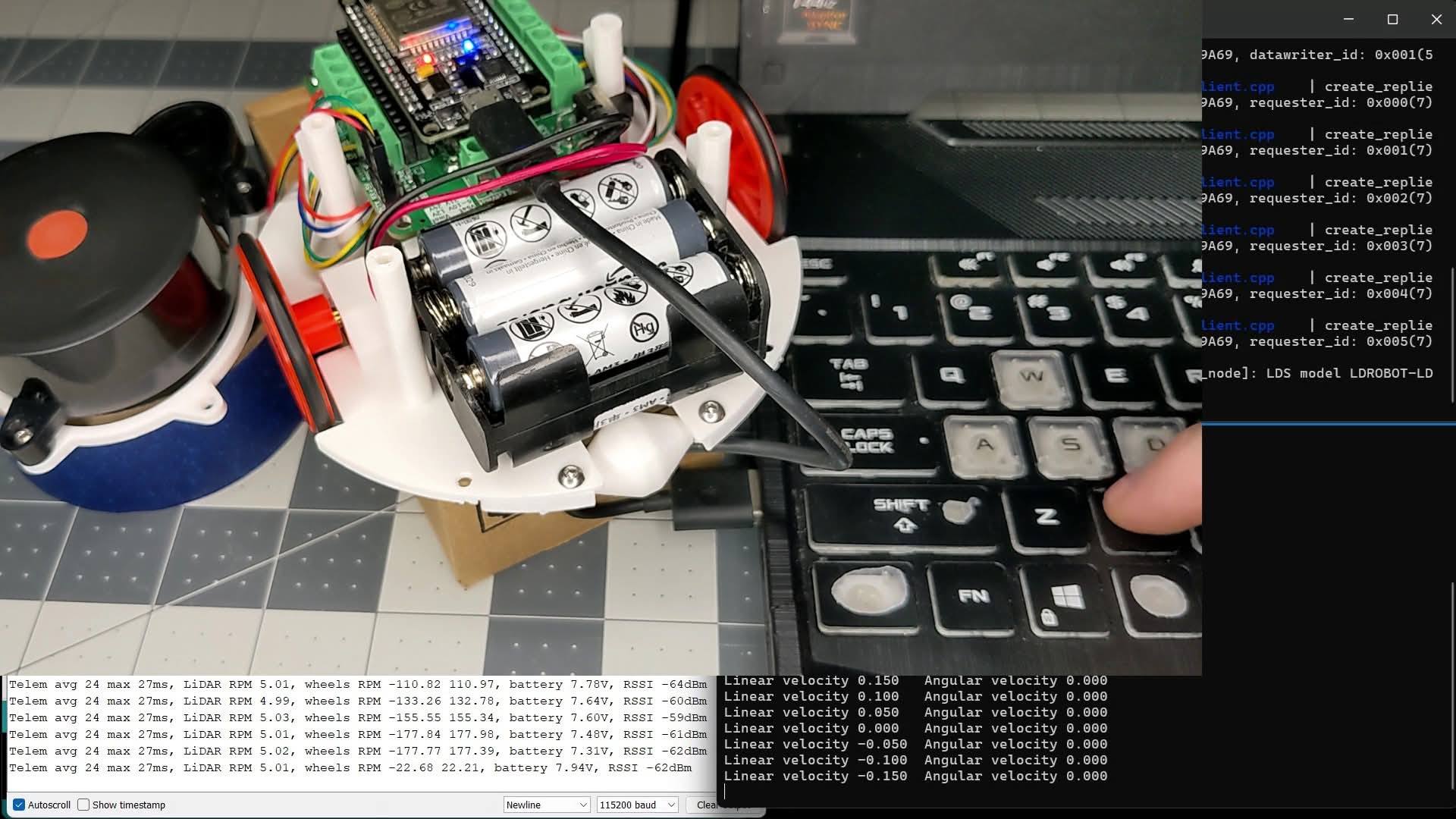
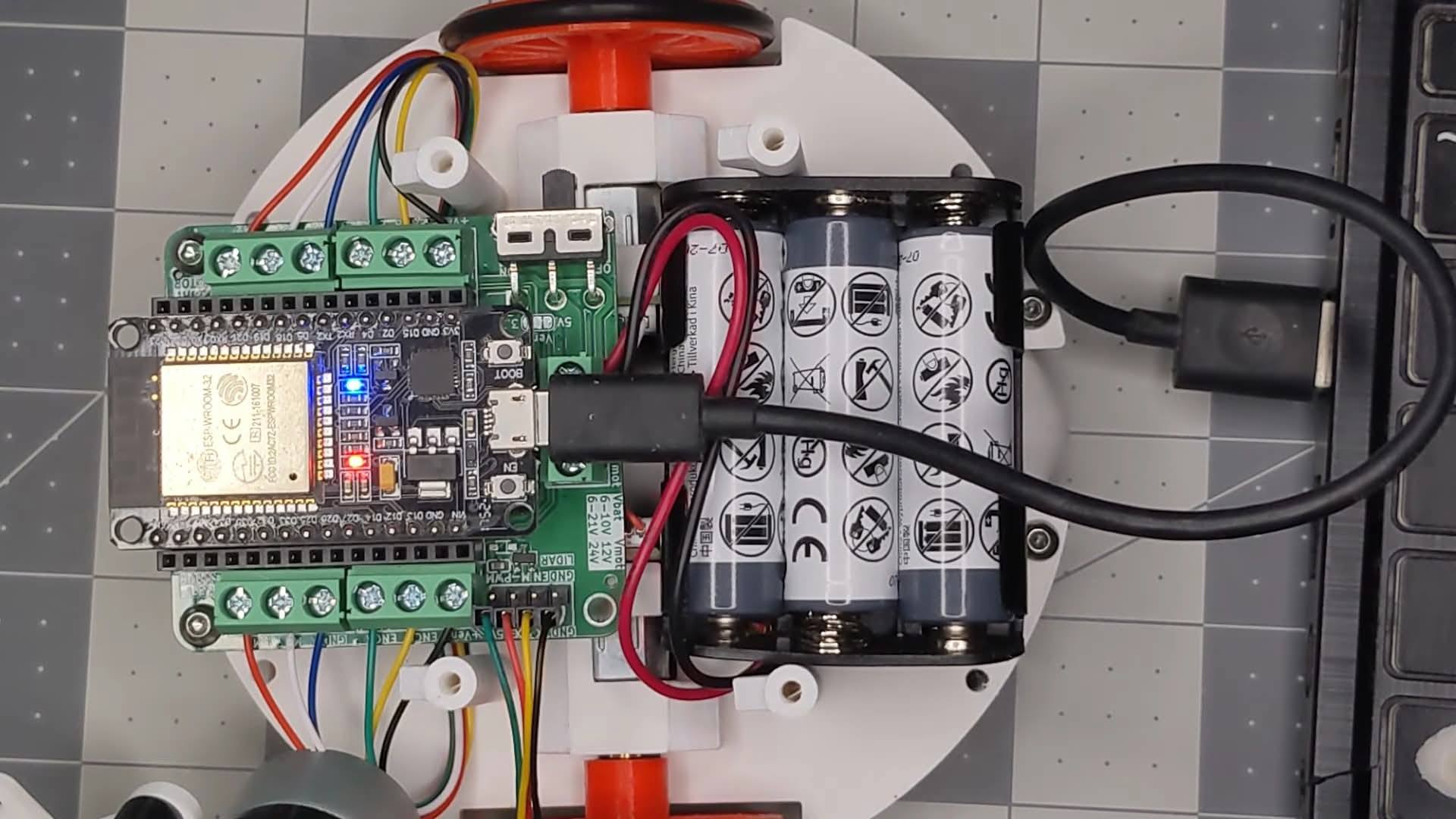
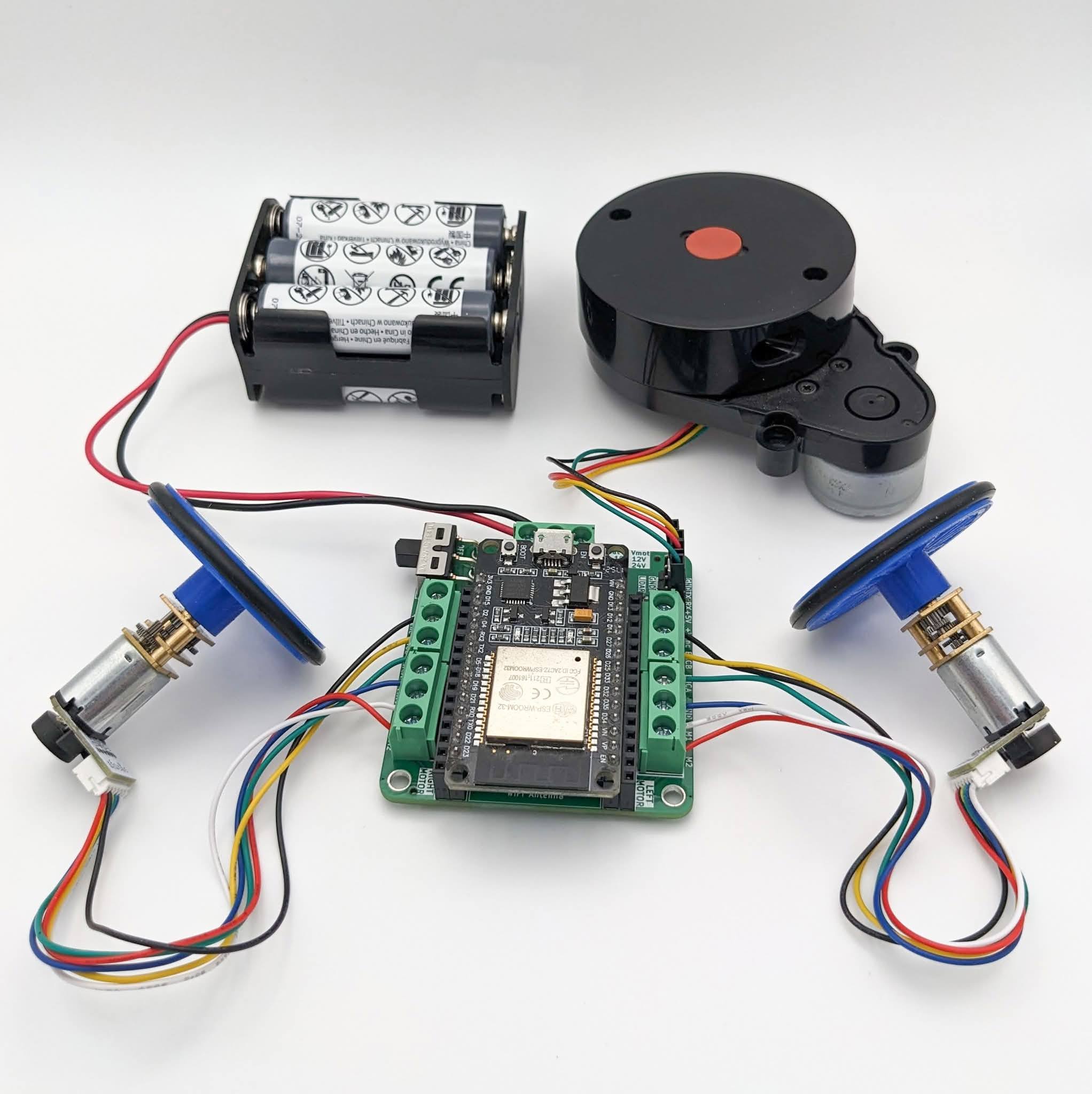
Click on any of the live construction photos of our self-driving robot to view hardware setups, wiring details, and sensor orientations in full size.
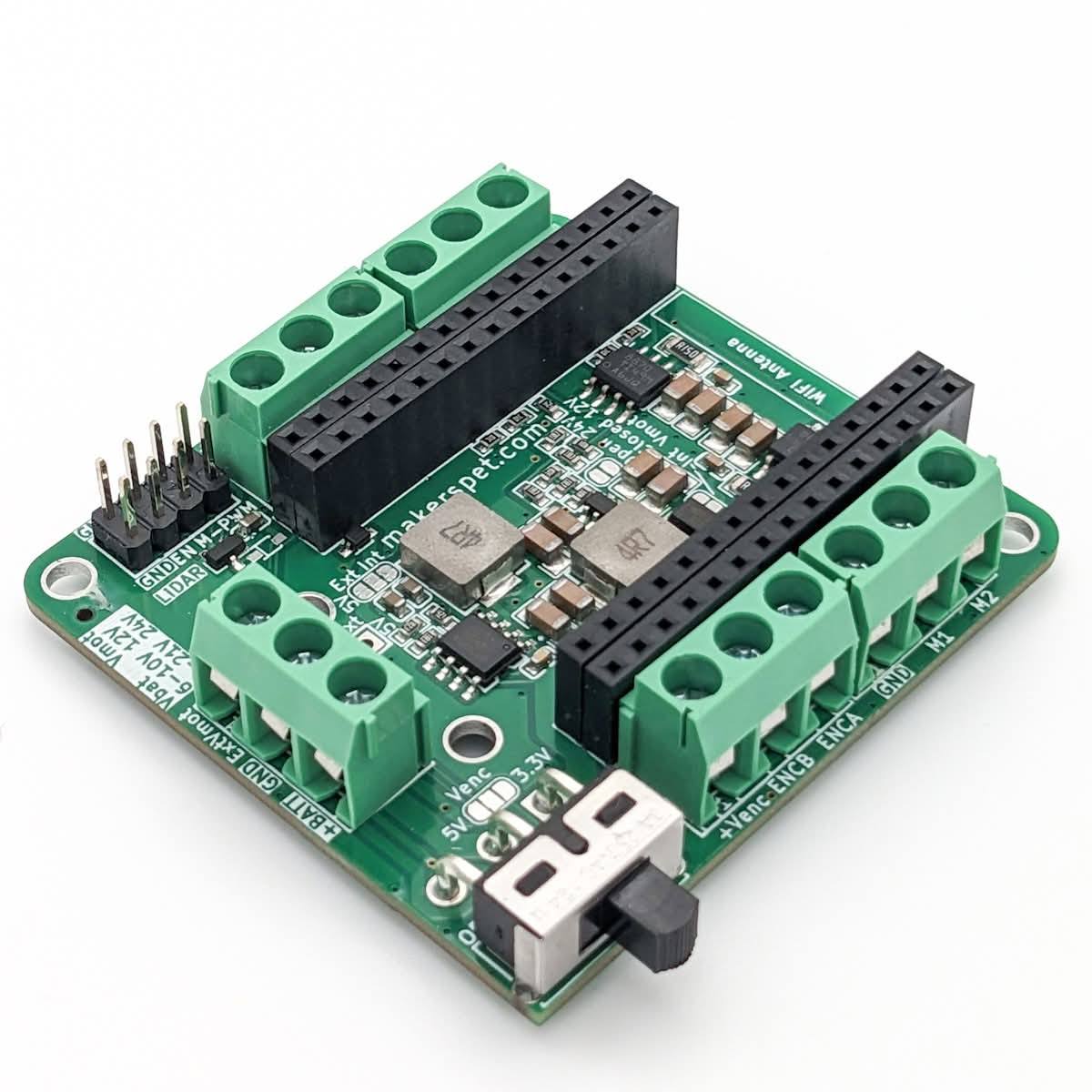



Key Hardware Specifications
- Microcontroller Core: Arduino Uno compatible R3 controller platform with fast analog-digital conversions.
- Proximity Array: HC-SR04 ultrasonic distance sensor with 2cm-400cm capability, mounted on a Micro SG90 180° servo.
- Actuation & Steering: 4 high-speed yellow BO DC motors connected to L298N high-current dual-bridge controller.
- Chassis & Power Train: Dual-layer heavy-duty acrylic chassis, powered by an dual 18650 high-discharge Li-ion series array (8.4V total rail).
Source Code - Autonomous Steering Algorithm
// Autonomous Self-Driving Navigation Logic
#include <Servo.h>
const int trigPin = A0;
const int echoPin = A1;
const int motorL1 = 5;
const int motorL2 = 6;
const int motorR1 = 9;
const int motorR2 = 10;
Servo radarServo;
int thresholdDistance = 30; // Threshold limit in cm
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(motorL1, OUTPUT);
pinMode(motorL2, OUTPUT);
pinMode(motorR1, OUTPUT);
pinMode(motorR2, OUTPUT);
radarServo.attach(11);
radarServo.write(90); // Center position
delay(1000);
}
int checkDistance() {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
long duration = pulseIn(echoPin, HIGH);
return duration * 0.034 / 2;
}
void loop() {
int centerDist = checkDistance();
if (centerDist > thresholdDistance) {
moveForward();
} else {
stopMoving();
// Scan Left
radarServo.write(150);
delay(500);
int leftDist = checkDistance();
// Scan Right
radarServo.write(30);
delay(500);
int rightDist = checkDistance();
// Return to Center
radarServo.write(90);
delay(500);
if (leftDist > rightDist && leftDist > thresholdDistance) {
turnLeft();
delay(800);
} else if (rightDist > leftDist && rightDist > thresholdDistance) {
turnRight();
delay(800);
} else {
moveBackward();
delay(1000);
turnRight();
delay(800);
}
}
}
void moveForward() {
digitalWrite(motorL1, HIGH);
digitalWrite(motorL2, LOW);
digitalWrite(motorR1, HIGH);
digitalWrite(motorR2, LOW);
}
void stopMoving() {
digitalWrite(motorL1, LOW);
digitalWrite(motorL2, LOW);
digitalWrite(motorR1, LOW);
digitalWrite(motorR2, LOW);
}
void turnLeft() {
digitalWrite(motorL1, LOW);
digitalWrite(motorL2, HIGH);
digitalWrite(motorR1, HIGH);
digitalWrite(motorR2, LOW);
}
void turnRight() {
digitalWrite(motorL1, HIGH);
digitalWrite(motorL2, LOW);
digitalWrite(motorR1, LOW);
digitalWrite(motorR2, HIGH);
}
void moveBackward() {
digitalWrite(motorL1, LOW);
digitalWrite(motorL2, HIGH);
digitalWrite(motorR1, LOW);
digitalWrite(motorR2, HIGH);
}