A drone is a flying robot that can be remotely controlled or fly autonomously through software-controlled flight plans in their embedded systems, working in conjunction with onboard sensors and GPS. To achieve flight, drones consist of a power source, such as a battery, rotors, propellers, and a frame.
The frame of a drone is typically made of lightweight, composite materials to reduce weight and increase maneuverability during flight. Drones require a controller, which is used remotely by an operator to launch, navigate, and land it. Controllers communicate with the drone using radio waves, including Wi-Fi.
Drones are now widely used in civilian roles ranging from search and rescue, surveillance, traffic monitoring, weather monitoring, and firefighting, to personal drones and business drone-based photography, as well as videography, agriculture, and delivery services.
In this project, you will build a controller board to control a quadcopter and fly your very own drone!
Hardware Requirement
At Receiver end
- Flight controller: Arduino UNO, USB Cable
- Receiver: Fly Sky FS-iA6 Receiver
- External Power: Battery - 12V
- Electronic Speed Controllers (ESC)
- Motor: A2212 - 2200KV BLDC Brushless Motor
- Frame: Quadcopter Frame Kit 450mm
At Transmitter end
- Transmitter: Fly Sky FS-i6 6-Channel 2.4 Ghz Transmitter
Software Requirement
- Arduino IDE
Component Details
Arduino UNO
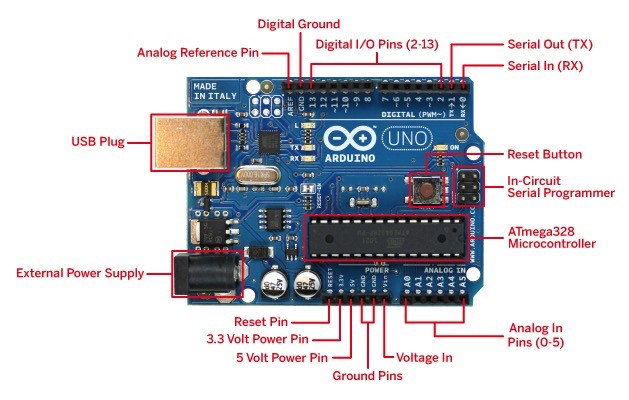
The Arduino Uno is a micro controller board which is based on the ATmega328. It has 14 digital input/output pins (6 can be used as PWM outputs), 6 analog inputs, a 16 MHz ceramic resonator, a USB connection, a power jack, an ICSP header, and a reset button.
Features
- Easy application programming using open source IDE
- Ready Library for most of sensors and application modules
- ATmega328 Controller running at 16MHz
- Input Voltage 6V to 20V DC
Electronic Speed Controllers (ESC)
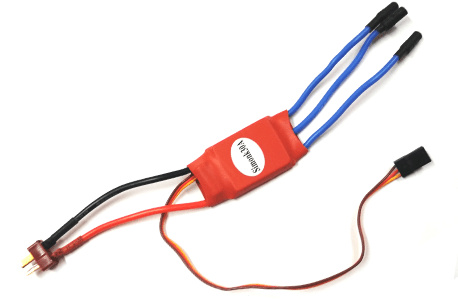
An electronic speed control or ESC is an electronic circuit that controls and regulates the speed of an electric motor. It may also provide reversing of the motor and dynamic braking. Miniature electronic speed controls are used in electrically powered radio controlled models.
Specification
- Weight: 25g
- Power input: 5.6V - 16.8V (2-3 cells Li-Poly)
- Constant current: 30A (Max 40A less than 10 seconds)
DC Motor – A2212 2200KV

A2212 is a brushless DC motor specifically made to power Quadcopters and Multirotors. It is a 2200kV motor that provides high performance, super power and brilliant efficiency. Perfect for 8-inch to 10-inch propellers.
Specification
- No load Current: 0.5 A at 10V
- Current Capacity: 12A/60s
- Thrust @ 3S with 1045 propeller: 800gms approx
Quadcopter Frame Kit 450mm

Quadcopter Frame Kit features integrated PCB connections so direct soldering the ESCs is practicable. This eliminates the need for a power distribution board or messy multi-connectors keeping your electronics layout neat and tidy.
Features
- Built from high quality glass fiber and ultra durable polyamide nylon.
- Integrated PCB connections for direct soldering ESCs.
- Width: 450mm | Weight: 295g