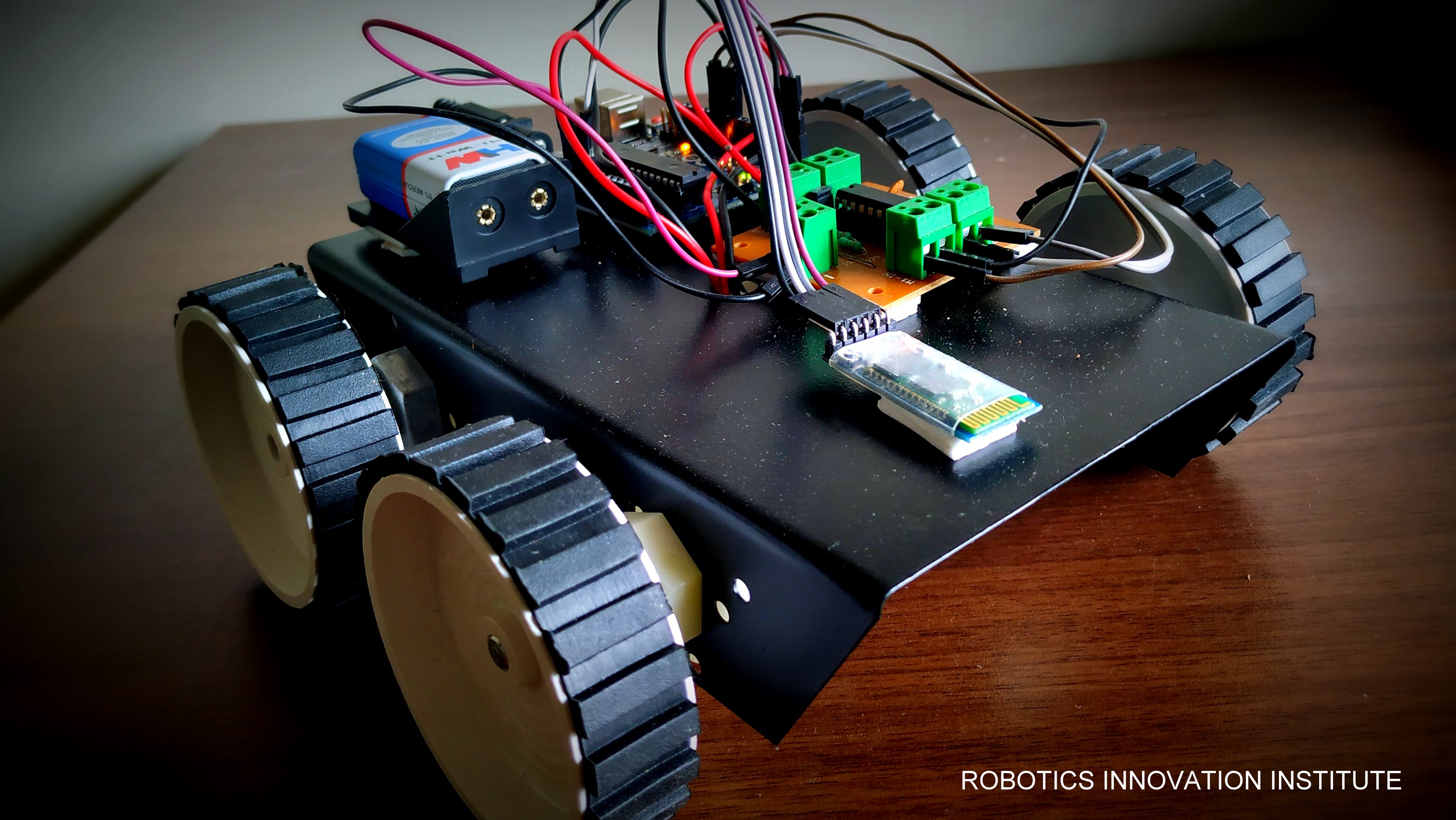
Hardware Requirement
Microcontroller: Arduino Uno board, USB Cable
Motor driver: L298N module
Motor: DC 3-6v BO Gear Motor With Plastic Tire Wheel
Receiver: HC-05 Bluetooth module
External Power: Battery - 9V
Robot chassis
Software Requirement
Arduino IDE
Bluetooth RC Controlled Mobile Application
Hardware Specification
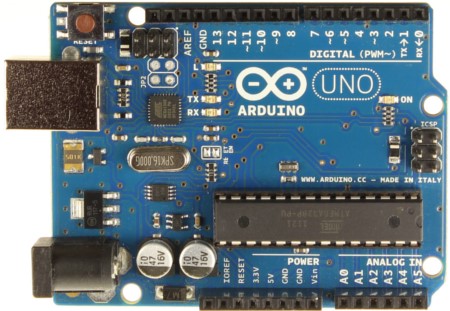
Arduino Uno
The Arduino Uno is a micro controller board which is based on the ATmega328. Arduino Uno have 14 digital input or output pins(where 6 can be used as PWM outputs), 6 analog inputs, a 16 MHz ceramic resonator, a USB connection, a power jack, an ICSP header and a reset button. It have everything needed to support the microcontroller, you need to simply connect it to a computer with a USB cable or power it with a AC-to-DC adapter or battery to get started.
Features
Easy application programming using open source IDE
Easy to learn Microcontroller using Arduino boards
256k Flash
Easy application programming using open source IDE
Ready Library for most of sensors and application modules
Specification
ATmega328 Controller
Digital IO 13
PWM Channel 6
Working Freq. 16MHz
DC current / IO 40mA
DC current / IO 50mA (3.3V)
Input Voltage 6V to 20V DC
Flash 32Kb
SRAM 2Kb
EEPROM 1Kb
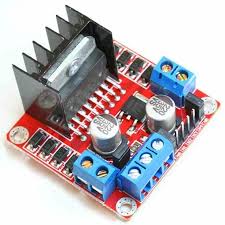
L298N Motor driver module
This dual bidirectional motor driver is based on the very popular L298 Dual H-Bridge Motor Driver IC. This module will allow you to easily and independently control two motors of up to 2A each in both directions.
Features
This module has a built-in 5v power supply, when the driving voltage is 7v-35v, this supply is suitable for power supply, DO NOT input voltage to +5v supply interface, however ledding out 5v for external use is available.
When ENA enable IN1 IN2 control OUT1 OUT2
When ENB enable IN3 IN4 control OUT3 OUT4
Specification
Double H bridge drive
Chip: L298N (ST NEW)
Logical voltage: 5V
Drive voltage: 5V-35V
Logical current: 0mA-36mA
Drive current: 2A (MAX single bridge)
Storage temperature: -20 to +135
Max power: 25W
Weight: 30g
Size: 43 x 43 x 27mm
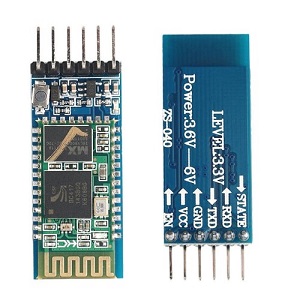
HC-05 Bluetooth Module
This comes with a tiny push button switch to enable programming.
HC-05 module Bluetooth SPP (Serial Port Protocol) module, designed for wireless serial connection setup. It has EDR (Enhanced Data Rate) of 3Mbps Modulation with complete 2.4GHz radio transceiver and baseband. It uses CSR Bluecore 04-External single chip Bluetooth system with CMOS technology and with AFH (Adaptive Frequency Hopping Feature).
Hardware Features
Typical -80dBm sensitivity
Up to +4dBm RF transmit power
Low Power 1.8V Operation ,1.8 to 3.6V I/O
PIO control
UART interface with programmable baud rate
Master-Slave 6-Pin JY MCU anti-reverse
Integrated Antenna
Software Features
Default Baud rate: 38400, Data bits:8, Stop bit:1, Parity : No parity, Data control, Supported baud rate:600,19200,38400,57600115200,230400,460800.
Given a rising pulse in PIO0, device will be disconnected.
Status instruction port PIO1: low-disconnected, high-connected.
PIO10 and PIO11 can be connected to red and blue led separately.
When master and slave are paired, red and blue led blinks 1time/2s in interval, while disconnected only blue led blinks 2times/s.
Auto-connect to the last device on power as default.
Permit pairing device to connect as default.
Auto-pairing PIN CODE:”0000” as default
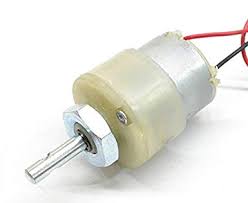
DC Motor – 200RPM – 12Volts
These motors are simple DC Motors featuring gears for the shaft for obtaining the optimal performance characteristics. They are known as Center Shaft DC Geared Motors because their shaft extends through the center of their gear box assembly.
Features
The metal gears have better wear and tear properties
Gearbox is sealed and lubricated with lithium grease and requires no maintenance.
Although motor gives 200 RPM at 12V, motor runs smoothly from 4V to 12V and gives the wide range of RPM, and torque.
The shaft has a hole for better coupling
Operating Voltage(V): 12
Rated Torque(kg-cm): 1.5
Stall Torque(kg-cm): 5.4
Robot Chassis
You can use any Robot Chassis availble in the market to mount all the parts use in this project

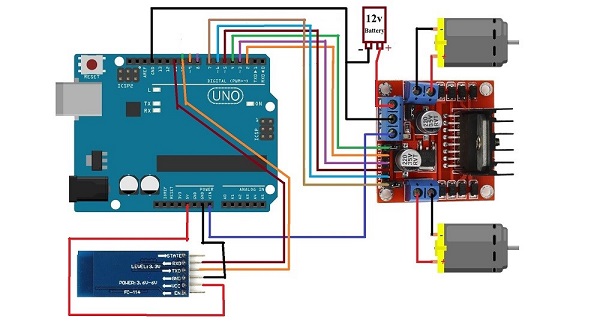
Circuit Diagram
Limitations
As the range of the Bluetooth Communication is limited (a maximum of 10 meters for class 2 devices for example) the control range of Bluetooth Controlled Robot is also limited.
Make sure that sufficient power is provided to all the modules, especially the Bluetooth Module. If the power is not sufficient, even though the Bluetooth Module powers on, it cannot transmit data or cannot be paired with other Bluetooth devices.
Application
Low range Mobile Surveillance Devices
Military Applications (no human intervention)
Assistive devices (like wheelchairs)
Home automation